前回のNT名古屋に出展してから約半年、その間に大垣miniMakerFairとかNT加賀とかつくろか!とかありましたが学会の準備の関係で出展できず…時間を確保できるようになって半年ぶりの出展です。
NT京都は自分が初めて出展した展示会で特徴が強いNTイベントの中でも特に特徴的な展示会です。
今回はその一部始終の記録です。
NT京都は西院の春日幼稚園での開催なので阪急電車で行くのですが、少し後に快速特急なるものを見つけたので乗ってみることに。それが偶然新しい車両のデビューだったようです。
京とれいん雅洛の初列車らしく人が凄かった…
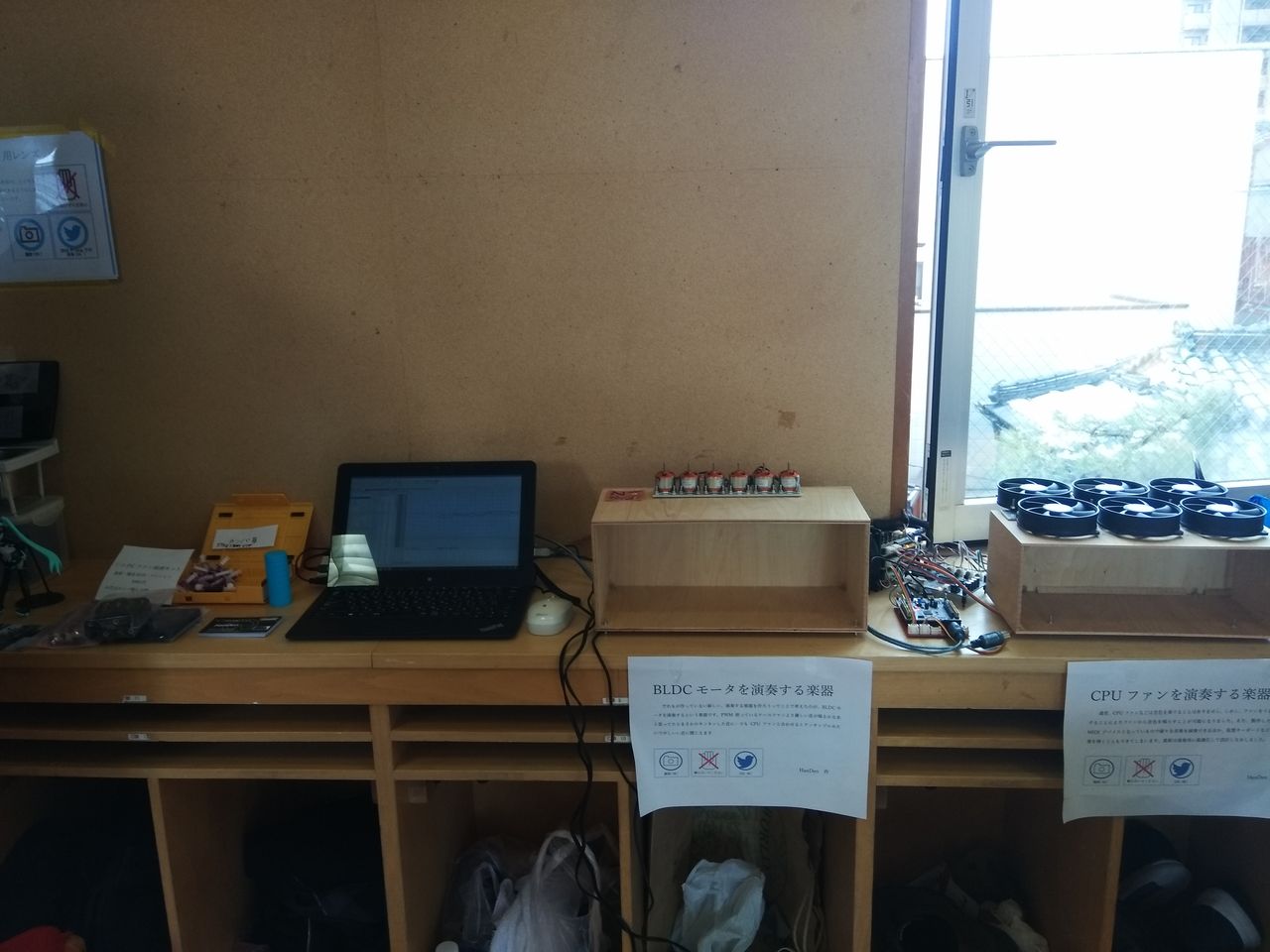
で会場に到着してセットアップ

他の展示会ならここから展示スタートって行くわけですがNT京都の場合は前日は準備日
準備日と言っても基本的には出展者同士の交流というかオフ会です。
他の展示物を見たり出展者同士で駄弁ったり、何かネタで遊んだり。
夕飯は安定のdominoピザパ

カップが何かおかしいとか突っ込まないw

目玉展示のましろちゃんと戯れたり
自分と同じMIDI楽器を集めてアンサンブルしてみたり

なんかあったり
いろいろとオフ会をして2日がメインの展示
展示終了後は片づけをしてもう一泊して帰宅しました。
NT京都は自分が初めて出展した展示会で特徴が強いNTイベントの中でも特に特徴的な展示会です。
今回はその一部始終の記録です。
NT京都は西院の春日幼稚園での開催なので阪急電車で行くのですが、少し後に快速特急なるものを見つけたので乗ってみることに。それが偶然新しい車両のデビューだったようです。

京とれいん雅洛の初列車らしく人が凄かった…
で会場に到着してセットアップ

他の展示会ならここから展示スタートって行くわけですがNT京都の場合は前日は準備日
準備日と言っても基本的には出展者同士の交流というかオフ会です。
他の展示物を見たり出展者同士で駄弁ったり、何かネタで遊んだり。
夕飯は安定のdominoピザパ


カップが何かおかしいとか突っ込まないw

目玉展示のましろちゃんと戯れたり

自分と同じMIDI楽器を集めてアンサンブルしてみたり

なんかあったり
いろいろとオフ会をして2日がメインの展示
展示終了後は片づけをしてもう一泊して帰宅しました。